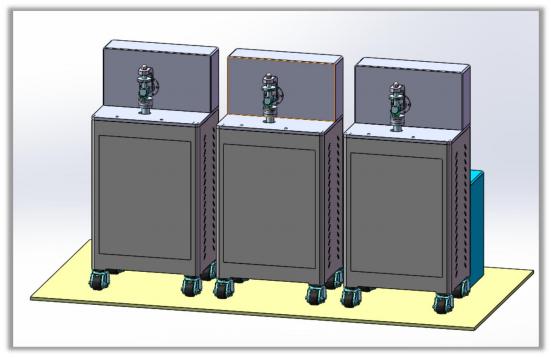
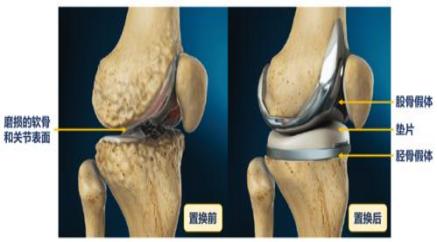
HK 3 тестер за износване на колянната става се състои от три части: тестов хост, приспособление и електронна контролна част. Той може да симулира износването, умората и отлепването на коленни импланти и други процеси на увреждане и може да тества 3 коленни стави едновременно.

1 .1 Характеристики
HK 3 тестер за износване на колянна става се състои от три части: тестов хост, приспособление и електронна част за управление. Той може да симулира износването, умората и отлепването на коленни импланти и други процеси на увреждане и може да тества 3 коленни стави едновременно Импланти. Тази машина за изпитване автоматично контролира силата на изпитване, времето и скоростта на изпитване и измерва силата на изпитване и въртящия момент в реално време. Приложим е за производството, употребата и изследването на протези на коленни стави и други свързани медицински области.
Шпинделното задвижване приема внесен AC серво мотор и система за управление, които могат да реализират безстепенно регулиране на скоростта и необходимото изчисляване на постоянния въртящ момент/постоянната аксиална сила в диапазона на скоростта; изпитвателната сила се прилага с помощта на система за натоварване на винтова пружина. Тестовата сила се прилага стабилно и надеждно и тестовата сила може да бъде зададена от оператора на компютърния интерфейс; скоростта на шпиндела. Всички параметри като брой обороти, тестова сила и време за тестване се контролират от компютър, който може да събира тестови данни в реално време и да ги чертае. Съответната тестова крива може да бъде направена и тестовите данни или крива могат да бъдат съхранени, извлечени и отпечатани по желание.
Трипосочна система за натоварване, задвижвана от серво мотор с различни компоненти за цялостно AP, въртене, флексия, абдукция и други движения, четирикомпонентният сензорен модул за сила тества аксиална сила на въртящия момент, съответно хоризонтална тяга и флексия Въртящ момент по време на разтягане , трипосочен серво агрегат, оборудван с високопрецизен въртящ се енкодер, измерване на ъгъл в реално време и изместване и предоставя ефективен източник на данни за управление на хост компютъра.
Всеки механизъм за движение е независимо контролиран и координиран, с три станции и 15 оси за завършване на шлайфането на теста за повреда на компонентите на съединението.
1.2 Основни спецификации
1. Софтуер за управление на инструмента с китайски операционен интерфейс.
2. Работещият софтуер на инструмента е готов за използване, не е необходим специален софтуер.
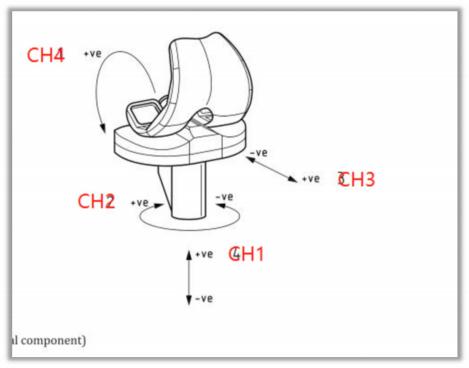
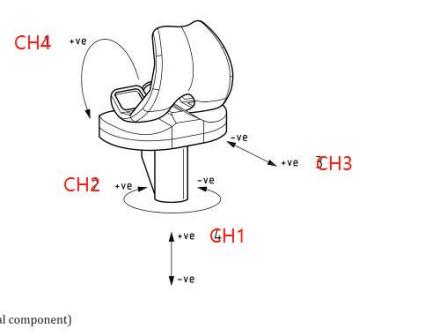
3. Степени на свобода: Всяка тестова станция може да реализира флексия/разгъване, вътрешно въртене/външно въртене, движение напред/назад, триизмерен контрол на движението и натоварване с аксиална сила и всяка степен на свобода може да бъде контролирани. Откриват се както сензорът, така и силата; възможно е свободно движение в посока навътре/навън и навътре/навън.
4. Нелинейността на сензора не е по-голяма от 0,10% от пълната скала, а хистерезисът не е по-голям от 0,10%, повторяемостта не е повече от 0,05% от пълната скала.
5. Изместване и обхват на сензора за изместване: аксиално изместване 100 mm, флексия/разгъване 120, вътрешна ротация/външна ротация 20, предно/задно изместване 15 mm, средно/латерално изместване 5 mm, инверсия/валгус.
6. Товароносимост и диапазон на сензора за сила: аксиално натоварване 3KN, вътрешен/външен въртящ момент 20Nm, натоварване напред/назад 1KN.
7. Точност на управление на силата и изместването: Грешката на силата и амплитудата на изместване в рамките на един цикъл не трябва да надвишава определения максимум. Максималната фазова грешка не трябва да надвишава 3% от пълния цикъл. Инструментът е тестван в съответствие с ISO 14243-1 и ISO 14243-3 за всяка контролируема степен на свобода. Измерени криви и стойности на отклонение на сензори за сила и преместване.
8. Има осемканална функция за аналогов вход и може да се синхронизира с външни данни.
9. Тестова честота: 1Hz, точност 0,1Hz.
10. Система за управление: Тя трябва да бъде оборудвана с отделен многостанционен, многоканален серво контролер за постигане на автоматичен контрол на силата и преместването в затворена верига.
11. Контролерът трябва да може да извършва компенсация за контрол на стойността от връхна стойност, за да гарантира, че пиковата стойност, изисквана от сигнала, може да бъде точно достигната, когато циклична форма на вълната се използва като команда за управление.
12. Трябва да може да прилага програмно тестване на персонализирани криви на походката; да може да извършва поетапно ръчно управление на всяка контролируема степен на свобода; и да можете да експортирате необработени данни във формат Excel.
13. По време на теста, софтуерът трябва да може да отразява кривите на силата и изместването на всяка станция в реално време и системата за управление. Системата трябва да може автоматично да коригира кривата на движение на пробата, за да съответства на целевата крива без ръчна намеса.
14. Скорост на управление в затворен контур в реално време ≤ 6kHz, с изключение на режима на управление на силата и изместването, контролерът трябва да може да прилага режима на управление на изчислената променлива.
15. Цифровата честота на вземане на проби не трябва да бъде по-малка от 100 kHz, а методът на вземане на проби трябва да включва: пикова стойност, стойност на низина, време време, максимум, минимум, средна стойност, цикъл/логаритъм и т.н.
16. Има двоен режим, работен режим за ограничаване на обратната връзка на канала.
17. Има функция за самопроверка на липсващото възбуждане на сензора.
18. Температура: Температурата на смазващата среда може да се поддържа на (37 ℃) и има система за контрол на температурата.
19. Смазочна среда: Повърхността на съединението може да бъде потопена в смазочната среда и смазочната среда трябва да бъде запечатана без изтичане; и оборудван с устройство за наблюдение на течове.
20. Тестови компоненти: оборудвани с необходимите инструменти за тестване, работни станции за зареждане и зареждане за всички движения Работната станция за потапяне осигурява референтни стандартни проби за калибриране на оборудването и отстраняване на неизправности.
21. Бутон за аварийно спиране: Оборудването трябва да бъде оборудвано с бутон за аварийно спиране.
22. Защита за безопасност: Оборудването трябва да бъде оборудвано с прозрачен и прозрачен защитен капак от термопластичен поликарбонатен материал; Има защитно блокиращо устройство. Когато вратата на защитния капак се отвори, оборудването трябва да може автоматично да спре тестването.
1.3 Условия на работа
При стайна температура В диапазона от 10 ℃~ 35 ℃;
Относителната влажност е не повече от 80%;
Правилна инсталация върху здрава основа;
В чиста среда без вибрации, корозивни среди и силно електромагнитно поле;
Диапазонът на колебание на захранващото напрежение не трябва да надвишава номиналното напрежение  10% .
10% .
2. Структурен състав
Тестовата машина е разделена на три работни станции, които са системата за задвижване на шпиндела, системата за зареждане на пробата и аксиалната сила. Трите работни станции споделят едно и също задвижване на шпиндела. Динамична система и софтуерна система за управление.
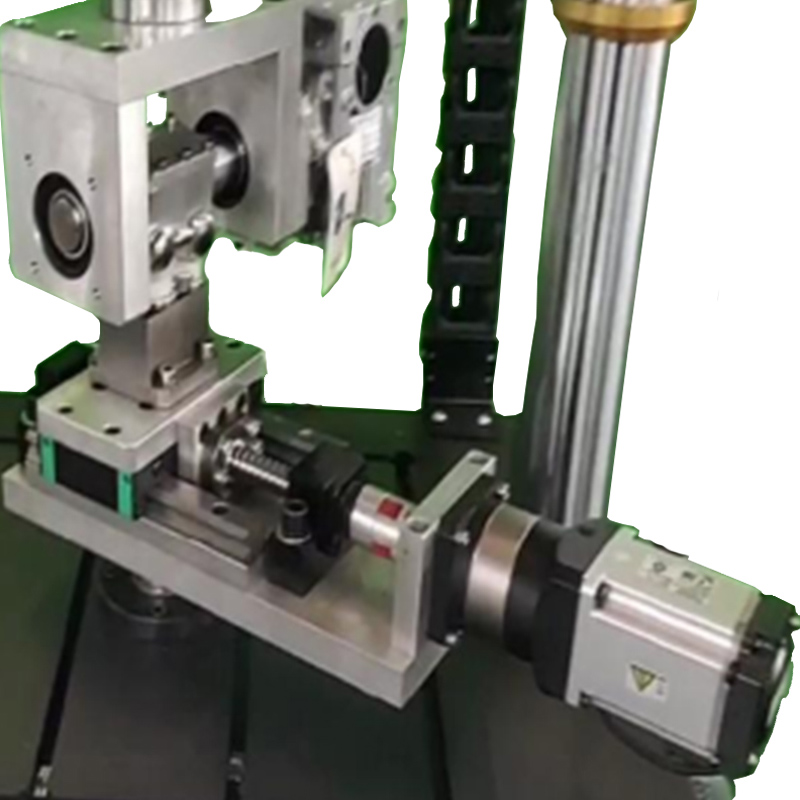
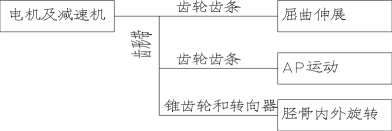
2.1 Шпинделна задвижваща система
Моторът на оста използва Panasonic AC серво интегрирана система за контрол на скоростта и мотор. Максималната мощност на двигателя е 7,5 Kw, мощността му е разделена на 3 изходни линии.
Първият: След зъбната рейка, електромагнитния съединител и сензора за въртящ момент, той се превръща във въртящото се махало на бедрената кост. Електромагнитният съединител е отговорен за контролирането на включването и изключването на мощността, а сензорът за въртящ момент е отговорен за измерване на въртящия момент. Измерете въртящия момент по време на работа.
Вторият: след преминаване през зъбчатия ремък и зъбната рейка, той става ляво и дясно възвратно-постъпателно преместване, задвижвайки движението на пробата AP.
Третият: чрез зъбния ремък, конусното зъбно колело и кормилното устройство, той се преобразува във въртеливото люлеене на тибията, карайки пробата да се върти навътре и навън.
Маршрутът на предаване е показан на фигурата по-долу.
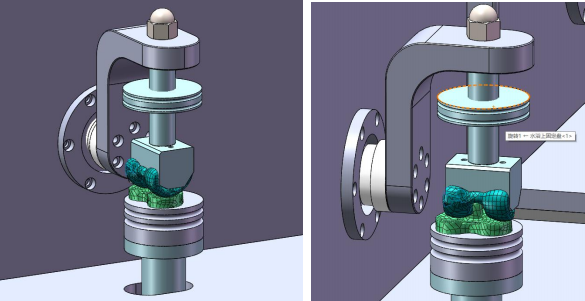
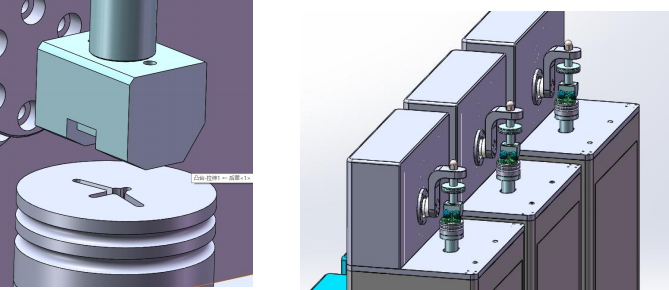
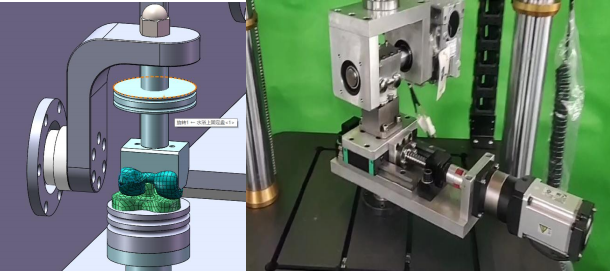
2.2 Система за зареждане на проби
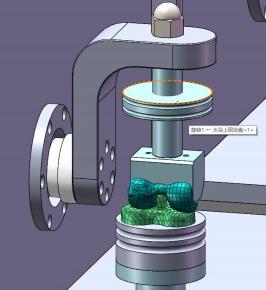
Система за зареждане на образец симулира свободата на движение при човешки условия за компонентите на импланта на колянната става Тя е инсталирана и фиксирана. Състои се от монтажна седалка, плъзгаща се седалка, найлонова седалка, ролка, плъзгаща се втулка и др.
Конкретното внедряване е както следва:
Монтажът на инструмента за износване на колянната става е относително сложен. Моля, инсталирайте го стриктно според диаграмата. Освен това са приложени съответните канали.
Моля, използвайте съответния номер на проводник, когато свързвате кабелите.
(Структурата, показана на фигурата, се използва само за демонстриране на принципа на движение, действителният обект ще има предимство)
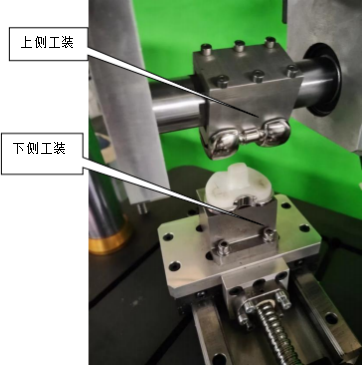

(Структурата, показана на фигурата, се използва само за демонстриране на принципа на движение, действителният обект ще има предимство)
Трябва да преработите горния и долния инструмент според пробата, за да изпълните изискванията на теста. (Подробностите за всеки размер на продукта варират)

6. Избор на канал и свързаните с него настройки
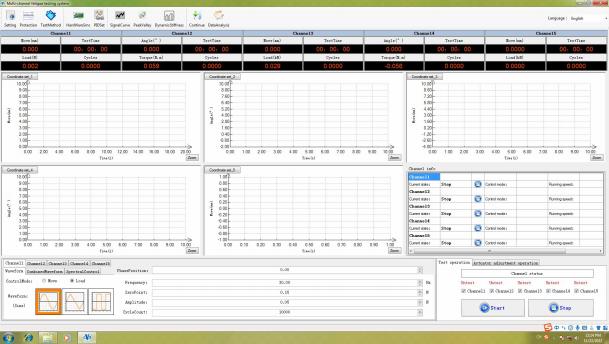
В комбинация с горната снимка, проверете кой канал работи, като проверите канала. Когато изпълнявате ISO 14243.3, изберете 1-4 пътека, Канал 5 е канал за разширение за последващи надстройки. За други експерименти с една или две оси, моля, изберете съответния канал.
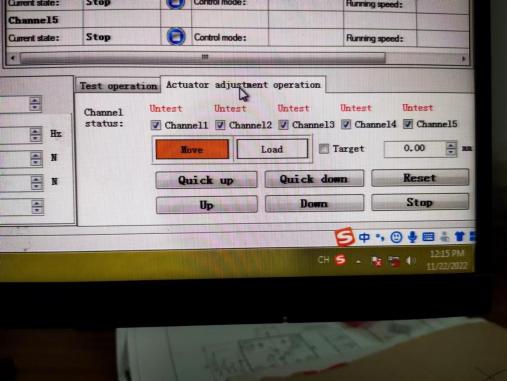
Бързо горе/нагоре = бързо зареждане/зареждане
Бързо надолу/надолу = Бързо надолу/надолу
7. В съответствие с ISO 14243.3 е необходимо да се импортира контролната вълнова форма, както е показано на фигурата:
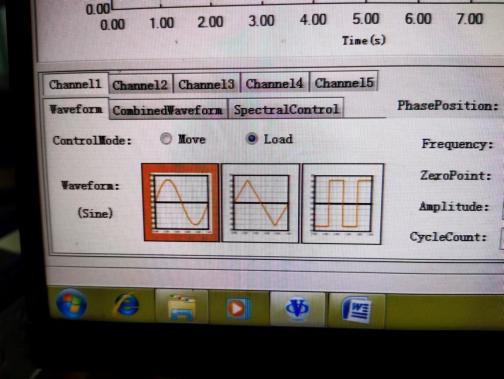
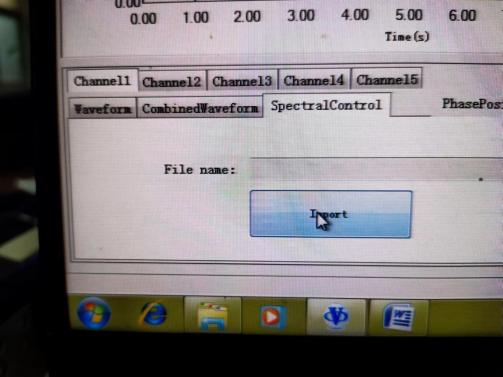
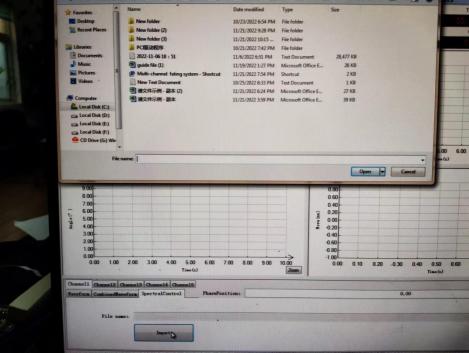
Изберете фабрично зададената вълнова форма. Ако трябва да зададете нова вълна или действие, можете да го направите в този файл. Променете и запазете под друго име.
За подробни настройки за всеки канал, моля, вижте ръководството за едноканален софтуер.
8. За защитата:
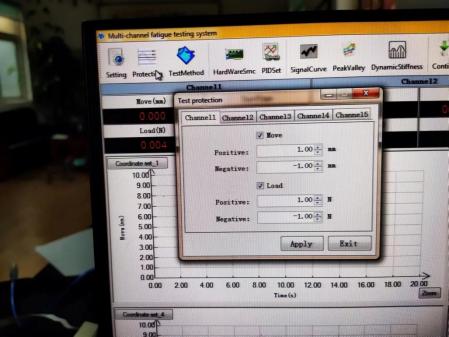
експериментът не се движи или не може да се стартира след щракване върху Старт, проверете дали има параметри, зададени извън допустимото отклонение в опциите за защита.
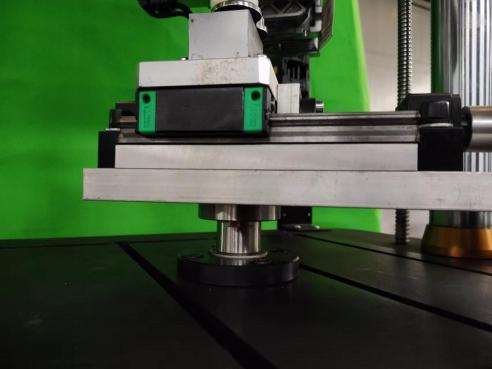
2.3 Система за натоварване с аксиална сила
Тази машина приема конструкция с пружинно натоварване. Натоварващият механизъм се задвижва от стъпков двигател, който се предава през зъбен ремък с кръгла дъга, синхронна ролка и прецизна сачмено-винтова двойка и се направлява от прецизна линейна водеща релса за движение, за да задвижи седалката за прилагане на сила. Прилагащата сила седалка е фиксирана с пружинен механизъм, който прилага сила върху плъзгащата се платформа, след като пружината е компресирана. Формира се изпитвателната сила между триещите се повърхности на ролковия образец. Чрез контролиране на мотора за задвижване на силовата седалка да се движи напред и назад в пространството, т.е. прилагането и големината на силата на изпитване може да се контролира. В равнината на седалката за прилагане на сила е монтиран сензор за натоварване. Събирайте силови сигнали. Водачът на лагера с линейно движение осигурява прилагането и стабилността на изпитвателната сила. Част за пружинно зареждане Лесна за зареждане и разтоварване.
Когато тестовата сила започне да се натоварва, сензорът ще въведе предварително зададеното налягане в контролната система на микрокомпютъра и предварително зададеното налягане. След това микрокомпютърът контролира двигателя да се движи назад, докато налягането в системата се балансира с предварително зададеното налягане.
2.4 Система за накисване на товара
на кутия за потапяне на течност, нагревател, температурен сензор, перисталтична помпа, силиконова тръба и др.
Клиентите могат да обработват отвори за позициониране на цилиндричната крайна повърхност според действителния размер на пробата, а ъгълът на затягане е регулируем. След като регулирате ъгъла, заключете левия плъзгач за позициониране.



2.5 Система за софтуерен контрол
Контролната система е инсталирана на контролната машина и е свързана с тестовия хост чрез комуникационен кабел. Работната среда на софтуера е WINDOWS XP. Софтуерът за управление е графичен интерактивен операционен интерфейс, който отговаря за изпращането на инструкции за управление на стартирането и спирането на системата, работната скорост, силата на натоварване, температурата на течността при потапяне и събирането на данни за работата на системата като аксиална сила, въртящ момент, температура, време за тестване и т.н. по време на теста. След изчисление и обработка, кривите сила-време, въртящ момент-време и други данни се извеждат под формата на диаграми.
В комбинация с горната снимка проверете канала, за да потвърдите кой канал работи. Когато изпълнявате ISO 14243.3, изберете 1-4 канала, 5 t каналът е разширителен канал за последващи надстройки. За други експерименти с една или две оси, моля, изберете съответния канал.
Бързо нагоре/нагоре = бързо зареждане/зареждане
Бързо надолу/надолу = бързо деинсталиране/деинсталиране
7. В съответствие с ISO 14243.3 е необходимо да се импортира контролната вълнова форма, както е показано на фигурата:
Изберете фабрично направената вълнова форма. Ако трябва да зададете нова вълна или действие, можете да го промените в този файл. Запазете под друго име.
За подробни настройки за всеки канал, моля, вижте ръководството за едноканален софтуер.
8. За защитата:
експериментът не се движи или не може да се стартира след щракване върху Старт, проверете дали има параметри, зададени извън допустимото отклонение в опциите за защита.
 Двуканална и балансираща машина за изпитване на умора
Двуканална и балансираща машина за изпитване на умора
 Машини за изпитване на възвратно-постъпателно триене на материала на зъбите
Машини за изпитване на възвратно-постъпателно триене на материала на зъбите
 Ротационна машина за изпитване на умора при огъване
Ротационна машина за изпитване на умора при огъване
 Машина за изпитване на умора при огъване на костна плоча
Машина за изпитване на умора при огъване на костна плоча
 Интрамедуларна машина за тестване на срязване на ноктите
Интрамедуларна машина за тестване на срязване на ноктите
 Машина за изпитване на компресия и умора при усукване на системата за вътрешна фиксация на гръбначния стълб
Машина за изпитване на компресия и умора при усукване на системата за вътрешна фиксация на гръбначния стълб